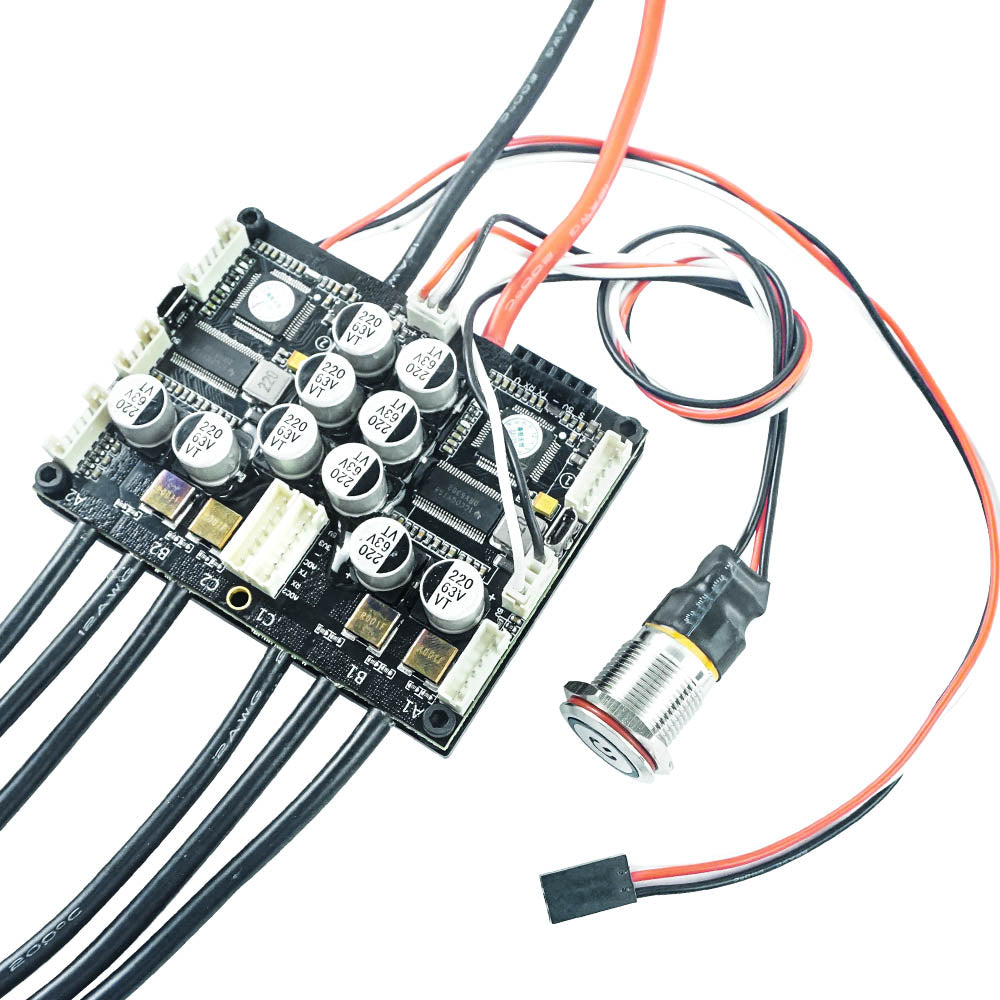















Dual FSESC4.20 Plus (Based on VESC ) with Anodized Aluminum Heatsink
Warm tips:https://www.youtube.com/watch?v=2scNVKf_dy4
It is recommended to keep firmware 5.2 from factory ship, the new firmware upgrade may damage the ESC.please do not remove the shrink to protect the pcb electronics components from impurites or metals which result in short circuit or esc burnt damage.
Dual FSESC4.20 Plus(Pro Switch) base on VESC, it’s upgraded on
Dual FSESC4.20 100A (Based on VESC ) with Anodized Aluminum Heatsink
Upgraded Features:
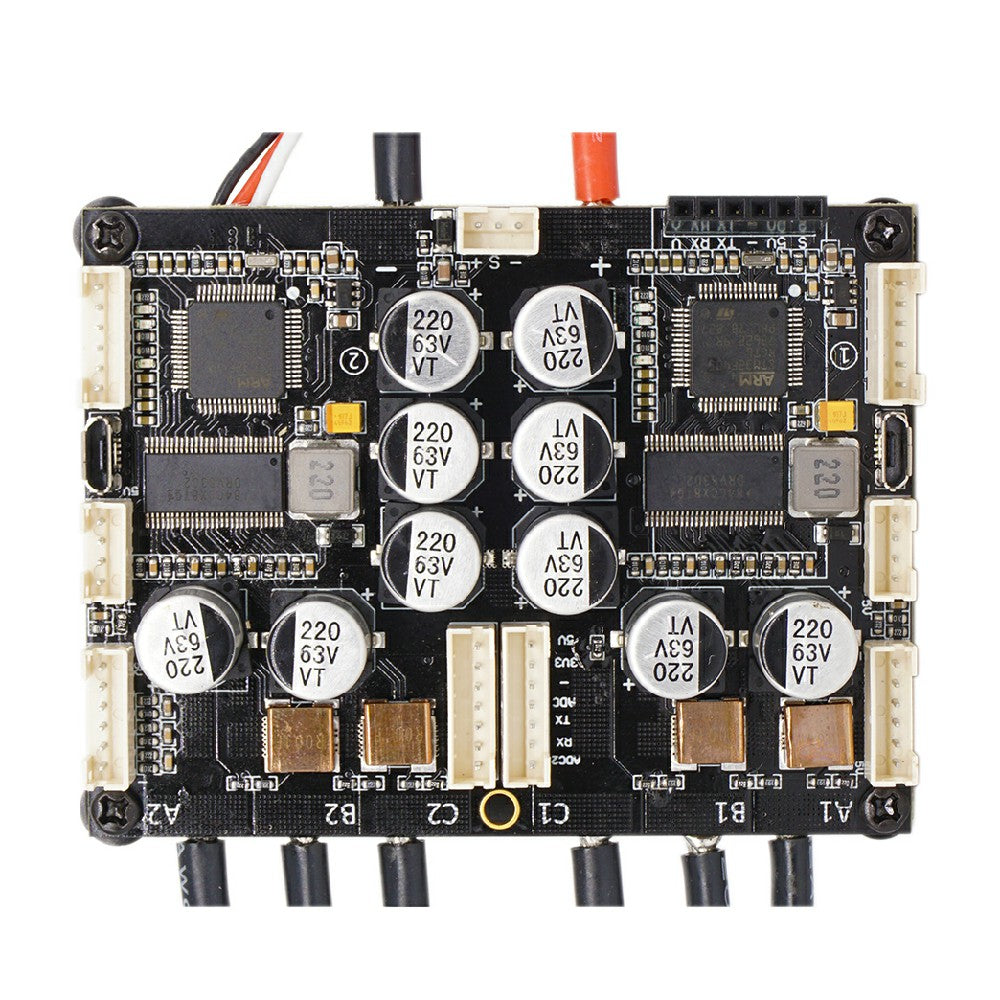
1.Integrated anti-spark switch function in the PCBA
2.More thinner for compact in case
With heatsink: 64 x84x20.5mm(Include Heatsink)
Specs:
◆ Hardware:V4.20
◆ Firmware: 5.2
◆ Amps: 50A continuous/single, 100A continuous/dual ,
burst 150A/single, burst 300A/dual
◆ Voltage: 8V-60V(Safe for Cells: 3-12S LiPo)
◆ BEC: 5V@1.5A
◆ BEC type: Internal driver support
◆ Timing: Software calibration
◆ Cutoff Voltage: Programmable
◆ Frequency: PWM input
◆ Programming card: No
◆ Reverse: Yes
◆ Regenerative braking power: support
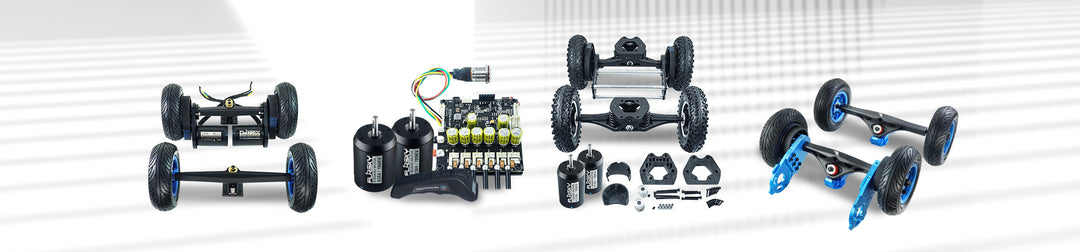
The shipping package contains:
1*Dual FSESC4.20 Plus + Heatsink
1*16mm LED button
2*VESC Sensor Wires
1*Micro USB
1*Manual
Manual:
Design In Details

Diagram