Skip to content
icon-X
Close menu
HOME
SPECIAL OFFER
NEW ARRIVAL
GROUP KIT
E-BOARD
ESC
FSESC
V4 SERIES
V6 SERIES
V75 SERIES
NON-VESC
ODrive
FPV/Drone/RC Airplane ESC
MOTORS
MOTOR
PULLEY &KEYWAY
WATER SPORTS
WATERPROOF MOTOR
WATERCOOLING ESC
WATER PROPULSION THRUSTER
BOAT ENGINE
ACCESSORIES
BMS
REMOTE
ANTI-SPARK SWITCH
WHEELS
DIY TOOL
PULLEY&KEYWAY&BELT
TRUCKS&MOTOR MOUNT
CONNECTORS
TFT SCREEN
CABLE WIRES
BEARINGS
BLUETOOTH MODULE
PROPELLERS
BLOGS
ABOUT US
Brand Story
Business Cooperation
Log in
instagram
Instagram
Facebook
YouTube
twitter
Twitter
Cart
icon-X
Close cart
Order note
Your cart is currently empty.
HOME
SPECIAL OFFER
NEW ARRIVAL
GROUP KIT
E-BOARD
ESC
FSESC
V4 SERIES
V6 SERIES
V75 SERIES
NON-VESC
ODrive
FPV/Drone/RC Airplane ESC
MOTORS
MOTOR
PULLEY &KEYWAY
WATER SPORTS
WATERPROOF MOTOR
WATERCOOLING ESC
WATER PROPULSION THRUSTER
BOAT ENGINE
ACCESSORIES
BMS
REMOTE
ANTI-SPARK SWITCH
WHEELS
DIY TOOL
PULLEY&KEYWAY&BELT
TRUCKS&MOTOR MOUNT
CONNECTORS
TFT SCREEN
CABLE WIRES
BEARINGS
BLUETOOTH MODULE
PROPELLERS
BLOGS
ABOUT US
Brand Story
Business Cooperation
account
Log in
icon-search
Search
icon-hamburger
Site navigation
icon-bag-minimal
Cart
Search
Search
Flipsky Technology is your best one stop shop for affordable ESC based on VESC, BLDC motors etc in DIY e-skateboard, e-bike, robots, efoil field.
JOIN THE DIY CLUB
Free shipping for V4, V6, V75 ESCs (except with water cooling series ,75350,75450,except for USA)
Enter your email
Subscribe
Subscribe
icon-right-arrow
Go to purchase
icon-right-arrow
icon-X
"Close (esc)"
OD Drive
Filter
icon-X
Close menu
Availability
In stock
(4)
Out of stock
(0)
Price
Category
Drones
(1)
Vehicles & Parts
(1)
icon-filter
Filter
Save 48%
Quick view
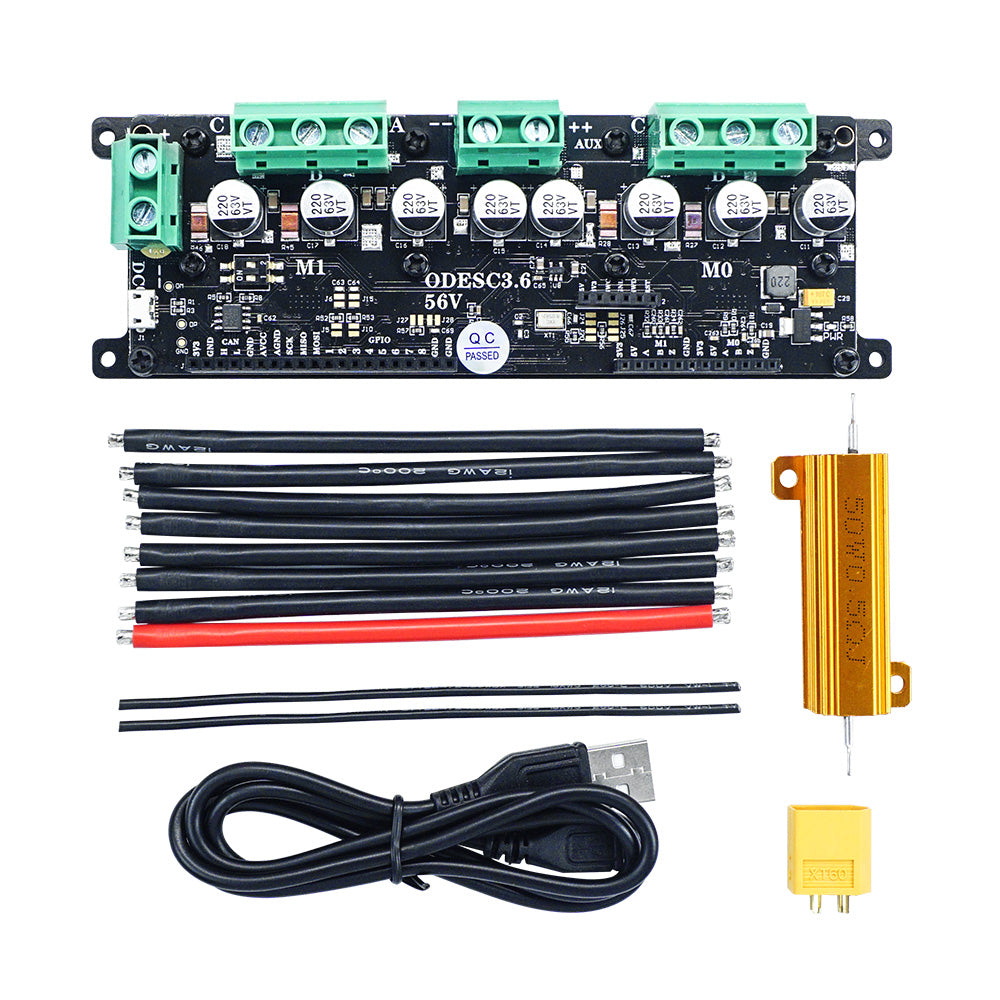
ODESC3.6 Dual-Drive Controller 56V with Heat Sink |Optimizes High Performance Brushless Motor High-Power | FOC BLDC based on ODrive
Regular price
$105.00
Sale price
$54.99
icon-X
"Close (esc)"
Save 26%
Quick view
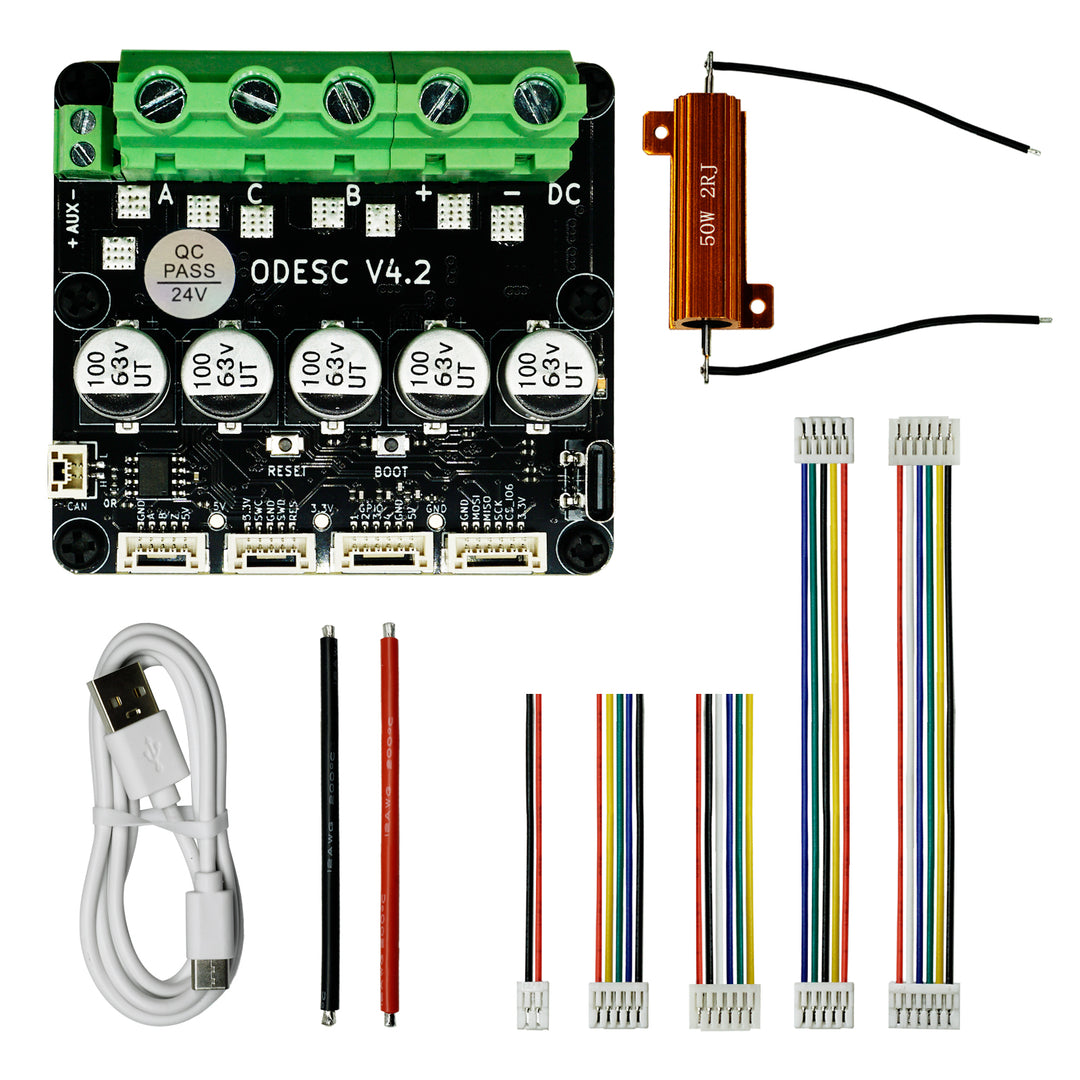
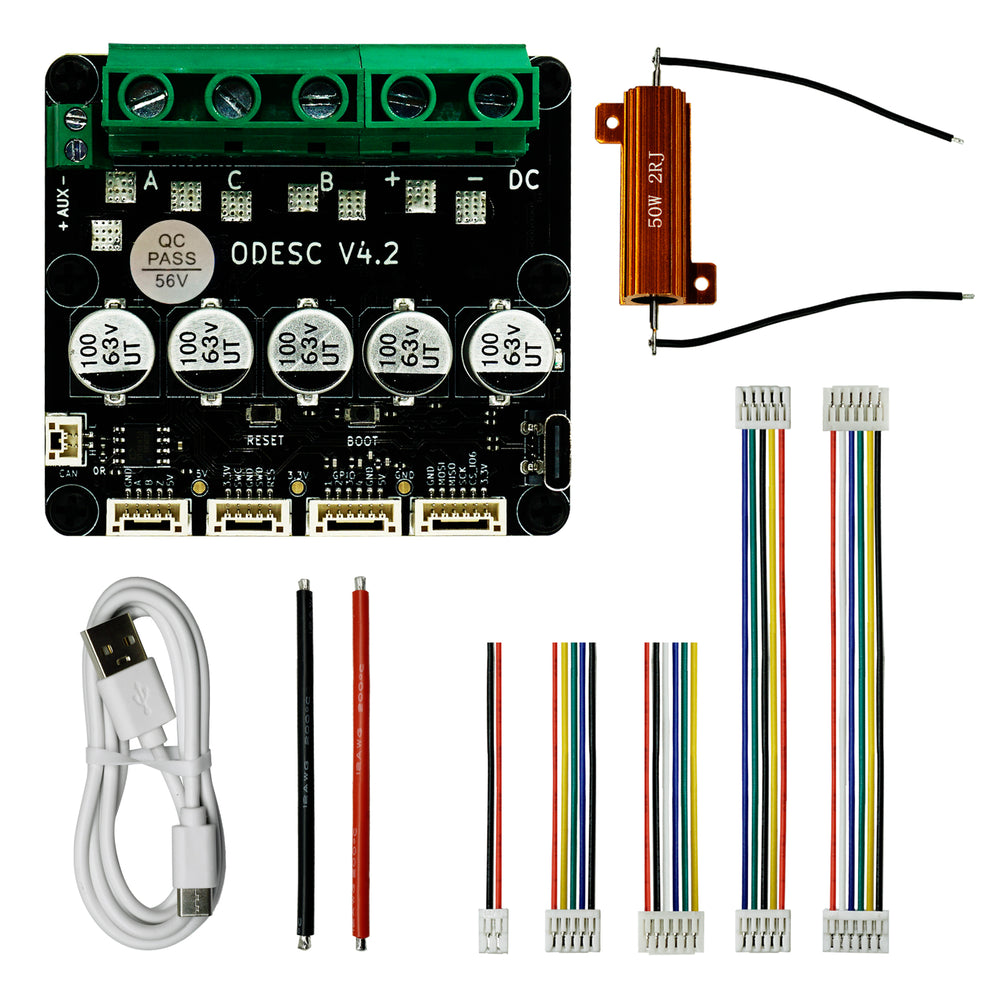
ODESC V4.2 Single-Drive High-Current High-Precision Brushless Servo Motor Controller, Based On ODrive3.6 Upgrade, Software Configuration Compatible With Odrivetool, FOC, BLDC
Regular price
$39.00
Sale price
from
$28.99
icon-X
"Close (esc)"
Save 9%
Quick view
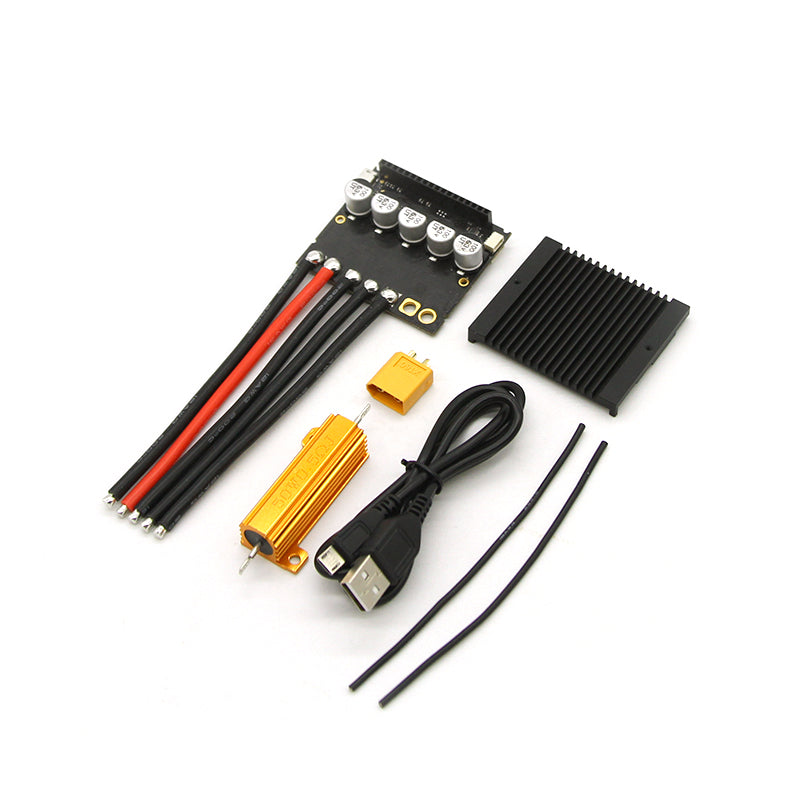
ODESC3.6 Single-Drive controller with Heat Sink | Optimization Of High Performance Brushless Motor High Power | FOC BLDC Based On ODrive
Regular price
$76.00
Sale price
from
$69.00
icon-X
"Close (esc)"
Save 15%
Quick view
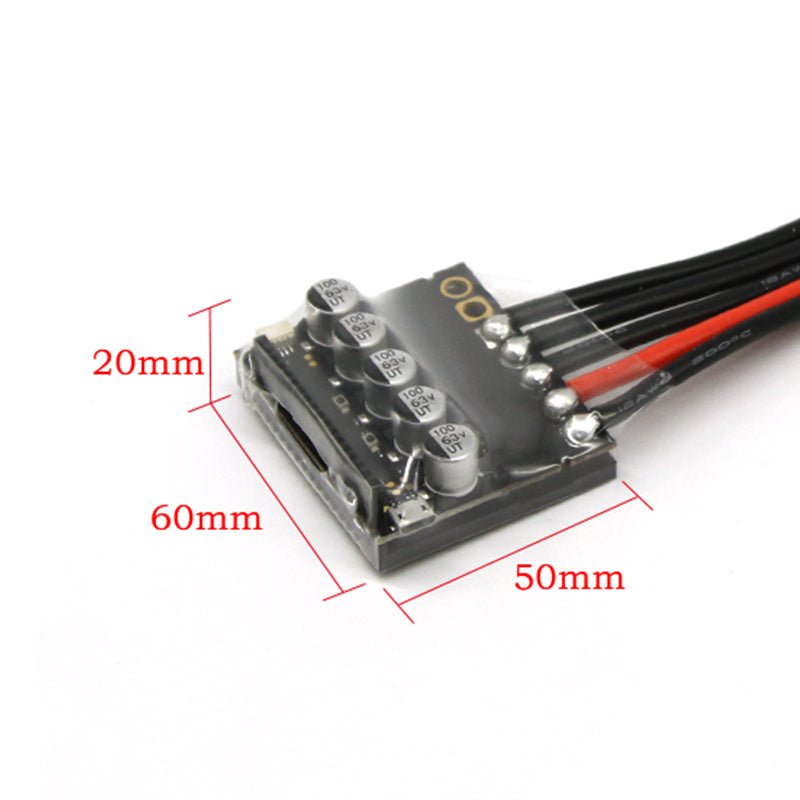
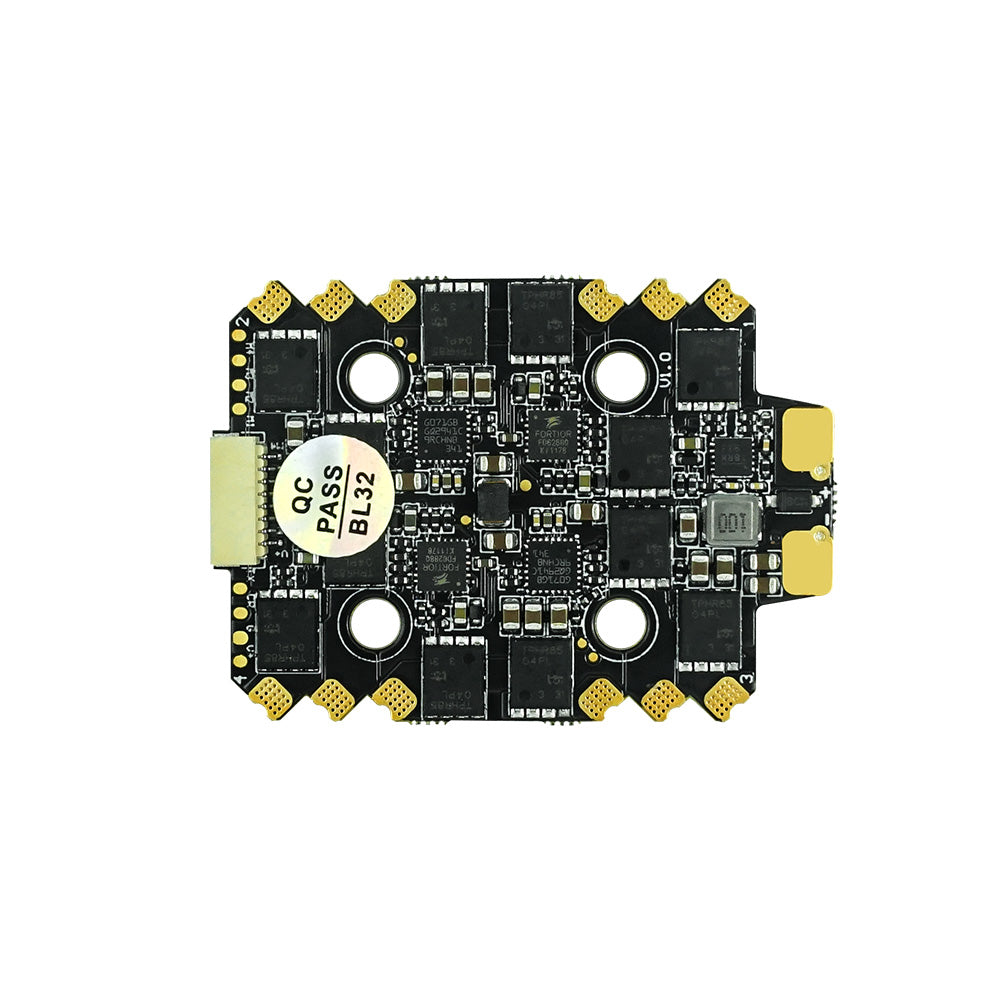
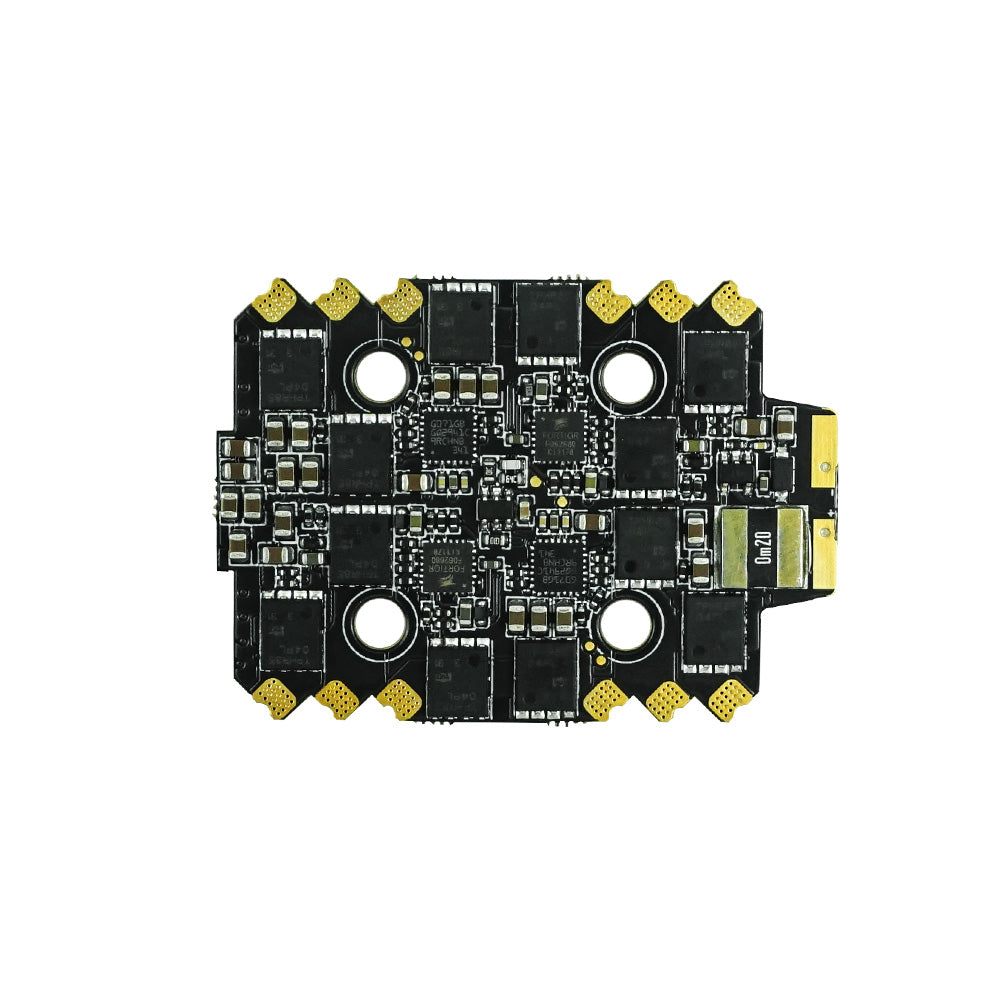
Flipsky 2-8S 70A ESC E70 G1 BLHeli_32-Bit 128K 4-In-1 For FPV Racing Drone Racing And Freestyle
Regular price
$88.00
Sale price
$74.99
icon-X
"Close (esc)"
Boat Engine
Optional button
Groups saving
Optional button
Remote
Optional button
icon-X
"Close (esc)"
icon-chevron-left
icon-X
icon-chevron
icon-X
OD Drive