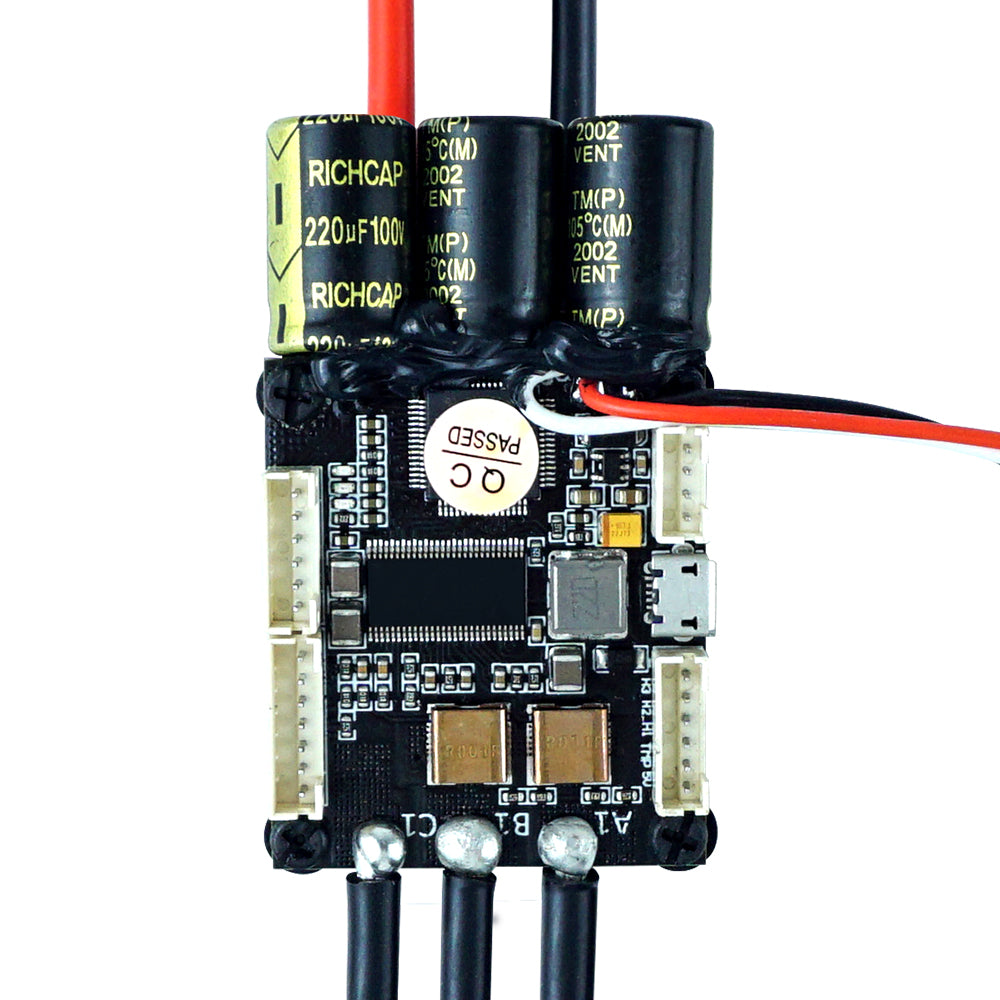













Mini FSESC4.20 50A base on VESC® 4.12 with Aluminum Anodized Heat Sink
It is recommended to keep firmware 5.2 from factory ship, the new firmware upgrade may damage the ESC.
Specs:
- Hardware:V4.20
- Firmware: Latest Version
- Amps: 50A continuous / 150A peak
- Cells: 3-13S LiPo
- Voltage: 8V-60V
- BEC: 5V@1.5A
- BEC type: Internal driver support
- Timing: Software calibration
- Cutoff Voltage: Programmable
- Frequency: PWM input
- Governor: No
- Weight: 80g
- PCB Size: 39x46x17.4mm
- Size:67 x39x18.3mm(Include Heatsink)
- Programming card: No
- Reverse: Yes
- Motor wire: 12AWG
- Power cable:12AWG
Warm tips: please do not remove the shrink to protect the pcb electronics components from impurites or metals which result in short circuit or esc burnt damage.
The shipping package contains
1*Mini FSECS4.20+ Heatsink
1* Micro USB
1* VESC Sensor Wire
1* Manual
Diagram