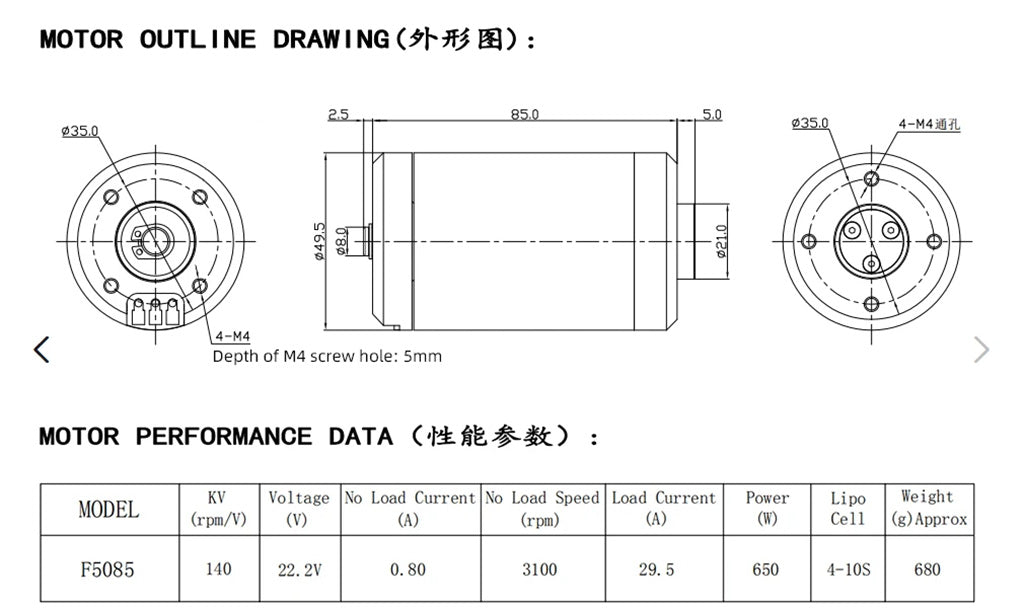
F5085 140KV 650W brushless motor for Direct Drive Propeller/Efoil
Remark: This product will not come with cable .
Features:
- Type: Underwater Propeller Motor
- Motor dimension: 50*85mm
- Waterproof level:IP28 grade waterproof
- Poles:28(please write 14 pairs when do setup)
- Max torque:1.5NM
- Weight:1.51b/0.68kg
Rerference information: