














Flipsky Dual FSESC6.7 Plus based on VESC6 With Power Button
Warm tips:
It is recommended to keep firmware 5.2 from factory ship, the new firmware upgrade may damage the ESC.
Warm tips: please do not remove the shrink to protect the pcb electronics components from impurites or metals which result in short circuit or esc burnt damage.
Upgraded features:
- PLUS switch version:
- Power on/off by pressing the button
- Added Can bus connector, be more convenient for 4WD set up
- Changed the USB port soldering process to SMT soldering instead of manual soldering
- Changed the big capacitors to SMT mounting capacitors ,and add more mosfets in the bottom side.
Spec:
- Hardware: V 6.7
- Firmware: Latest firmware version
- Voltage: 8V - 60V (Safe for 3S to 12S LiPo) for the dual ESC
- Voltage spikes may not exceed 60V
- Continuous 100A single, total 200A
-Instantaneous current 400A per single, total 800A for system instantaneous current. values depend on the mounting and ambient temperature around the device!
- 5V 1.5A output for external electronics for single
- 3.3V 1A output for external electronics for single
- Modes: DC, BLDC, FOC (sinusoidal)
- Supported sensors: ABI, HALL, AS5047
-ERPM:150000
-Size: 83*27.3*18.3mm(WITH ALU CASE)
-Size: 78*78*27.3mm(WITH Heat Sink)
-Motor wire: 12AWG
-Power cable:8AWG
-Recommend bullet connectors: 4MM Bullet Connector
-Reminder: Detected battery voltage tolerance: +/-0.6V
The shipping package contains:
- 1*Dual FSESC6.7 Plus
- 2*VESC Sensor Wires
- 1*LED button
- 1*Micro USB
- 1*Manual
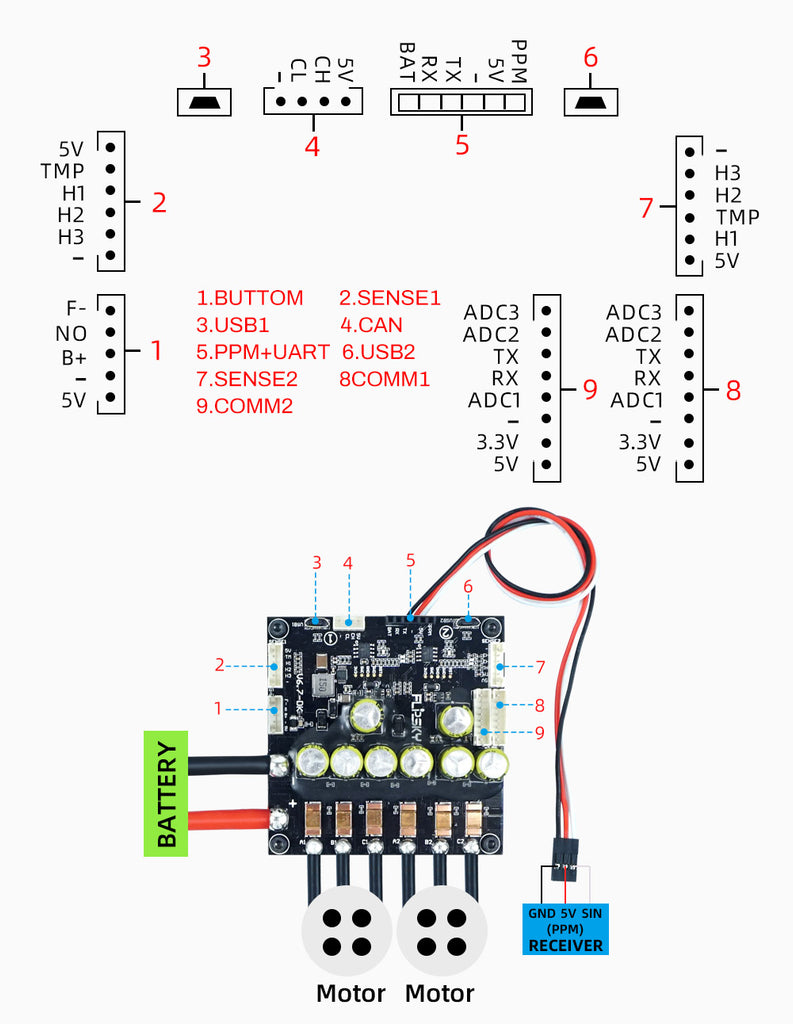
Dual FSESC6.7 Wiring Diagram:
DUAL FSESC6.7 PLUS with AUL CASE SIZE:


Programming Tutorial Reference (VESC tool 1.16)
