




Warm tips: please do not remove the shrink to protect the pcb electronics components from impurites or metals which result in short circuit or esc burnt damage.
Warm tips:
It is recommended to keep firmware 5.2 from factory ship, the new firmware upgrade may damage the ESC.
Manual download:Dual_FSESC4.20_100A_MANUAL_20181106.pdf.pdf
Specs
- Hardware:V4.20
- Firmware:Latest Version
- Current:50A continuous/single, 100A continuous/dual , Instantaneous current 150A per single, total 300A for system instantaneous current.
- Voltage: 8V-60V (Cells: 3-13S LiPo,Safe for 3S to 12S LiPo,Voltage spikes may not exceed 60V! )
- ERPM:60000
- BEC: 5V@1.5A
- BEC type: Internal driver support
- Modes: DC, BLDC, FOC (sinusoidal)
- Timing: Software calibration
- Cutoff Voltage: Programmable
- Frequency: PWM input
- Governor: No
- Programming card: No
- Reverse: Yes
- Motor wire: 12AWG
- Power cable: 12AWG
The shipping package contains:
- 1*Dual FSESC4.20 + Heatsink
- 2*VESC Sensor Wires
- 1*Micro USB
- 1*Manual
Function Details:
◆ DRV8302 MOSFET driver / buck converter / current shunt amplifier.
◆ 12pcs NTMFS5C628NL MOSFETs.
◆ Regenerative braking.
◆ DC motors are also supported.
◆ Sensored or sensorless operation.
◆ Adaptive PWM frequency to get as good ADC measurements as possible.
◆ Good startup torque in both sensored and sensorless mode.
◆ Duty‐cycle control, speed control or current control.
◆ Wireless WII nunchuk (Nyko Kama) control through the I2C port. This is convenient for electric skateboards.
◆ Optional PPM signal output. e.g. when controlling an RC car from a Rasp Berry Pi or an android device.
◆ The USB port uses the modem profile, so an Android device can be connected to the ESC without rooting. Because of the servo output, the odometry and the extra ADC inputs(that can be used for sensors), this is perfect for modifying an RC car to be controlled from Android (or Raspberry Pi).
◆ Sensored and sensorless (FOC) Field Oriented Control allows your electric skateboard to run with barely any motor noise, it auto-detects motor parameter since FW3.34.
◆ Many safety features such as current control and temperature control features.
◆ The motor is used as a tachometer, which is good for odometry on modified RC cars.
◆ Adjustable protection against:
Low input voltage
High input voltage
High motor current
High input current
High regenerative braking current (separate limits for the motor
and the input)
Rapid duty cycle changes (ramping)
High RPM (separate limits for each direction).
◆ When the current limits are triggered, a soft back-off strategy is used while the motor keeps running. If the current becomes too high, the motor is switched off completely.
◆ The RPM limit also has a soft back-off strategy.
◆ Commutation works perfectly even when the speed of the motor changes. This is due to the fact that the magnetic flux is integrated after the zero crossing instead of adding a delay based on the previous speed.
◆ When the motor is rotating while the controller is off, the commutations and the direction are tracked. The duty-cycle to get the same speed is also calculated. This is to get a smooth start when the motor is already spinning
Advanced Features:
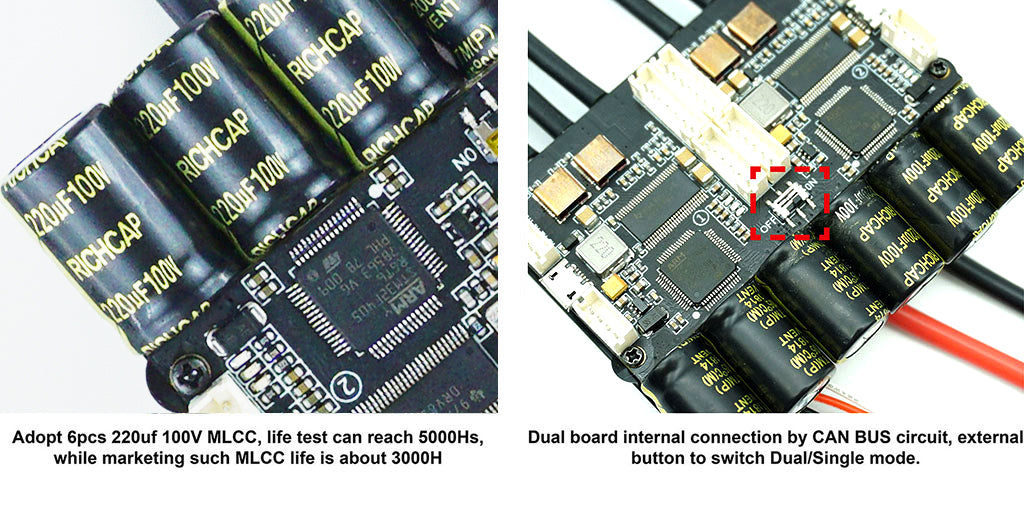
- Dual ESC can reach 100A big current, give your board strong power
- One PCBA board integrate two FSESC4.20 ’s function by internal CAN BUS circuit connection.
- The mater and slave board connection can be switched On/Off
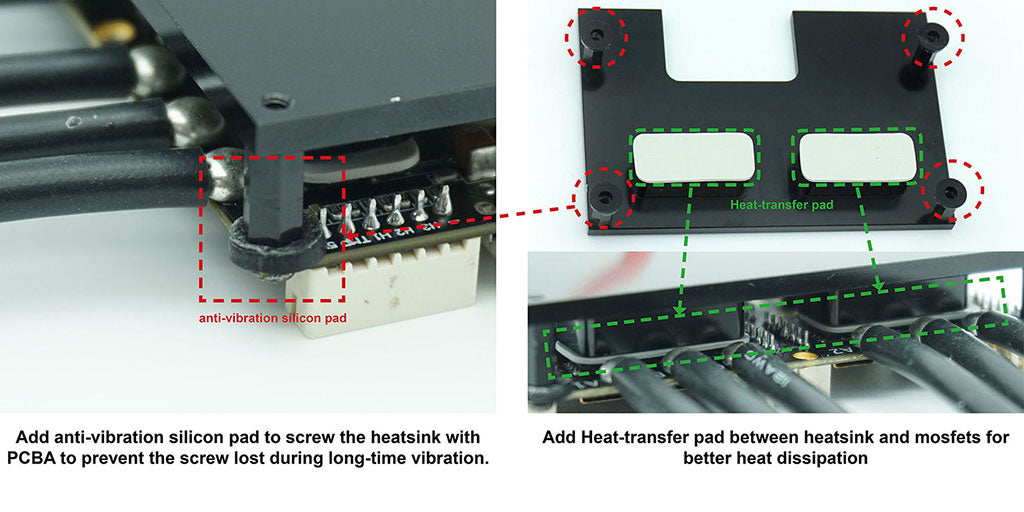
- Delicate design in details for high quality assurance: add Anti-vibration silicon pad for screw heatsink and heat-transfer pad
- Preserve Bluetooth module and RF module connections for both master and slave board
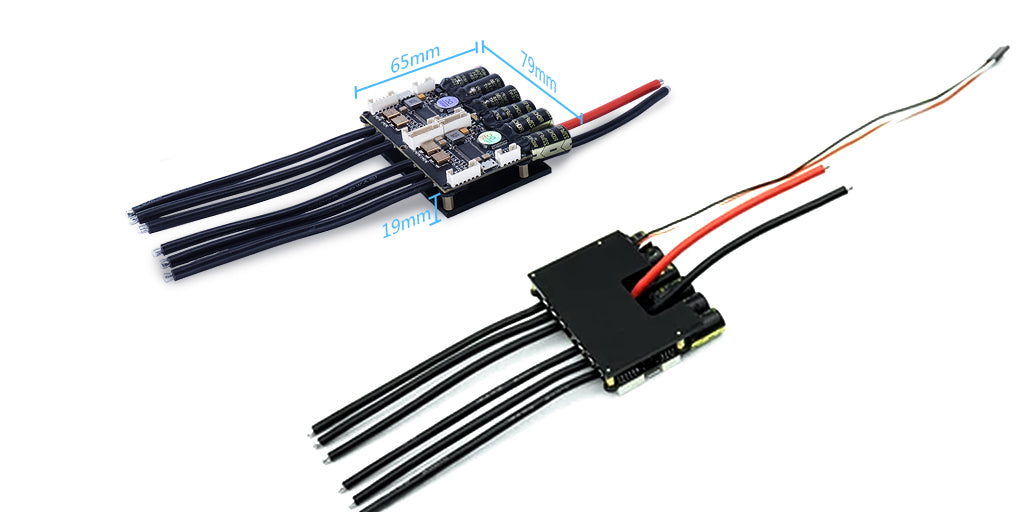
- Super small size and light weight with heatsink: 79mm*65mm*19mm(L*W*H), wight: 150g
See How Our Product Made a Difference!





Programming Reference Tutorial 1.16
