
Spec:
- 3mm x 3mm x 20mm Steel Keyway (Fit for Flipsky BLDC Belt Motor 6374)
- 3mm x 3mm x 14mm Steel Keyway (Fit for Flipsky BLDC Belt Motor 6354/6384)

Kindly Reminder !
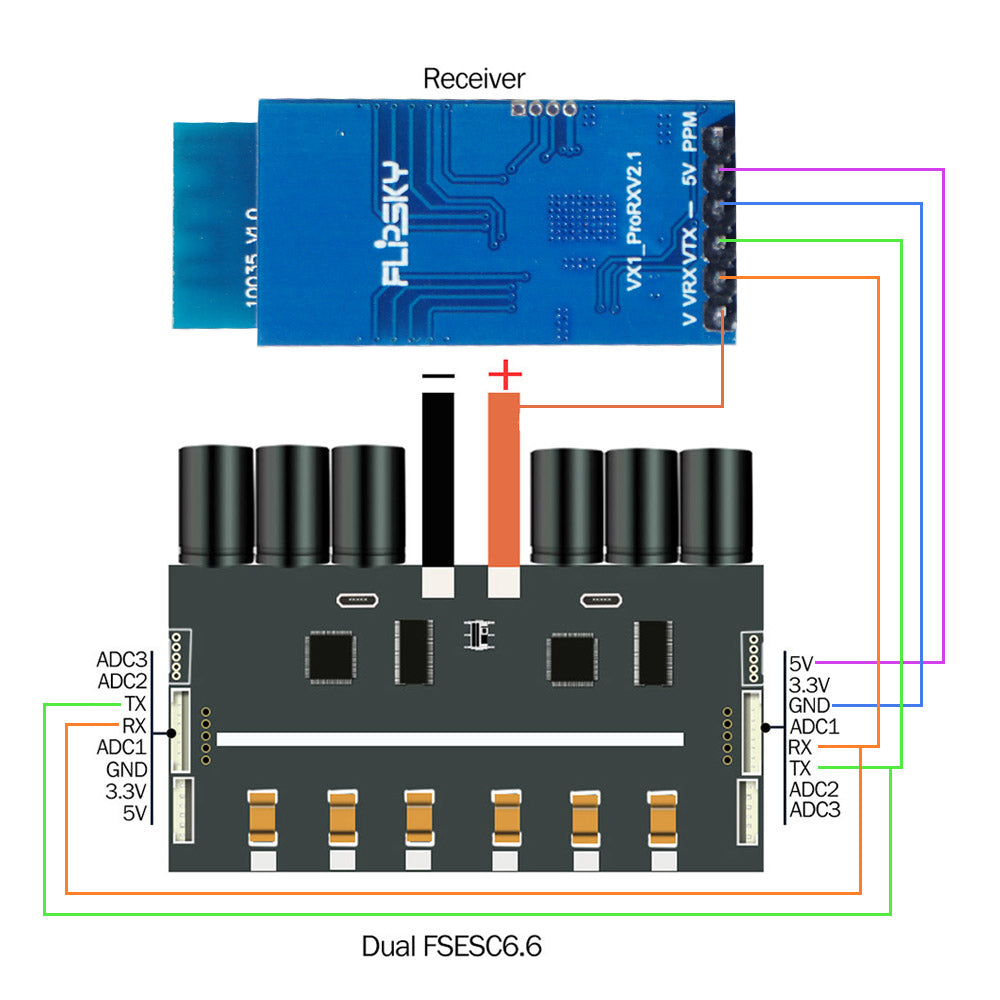
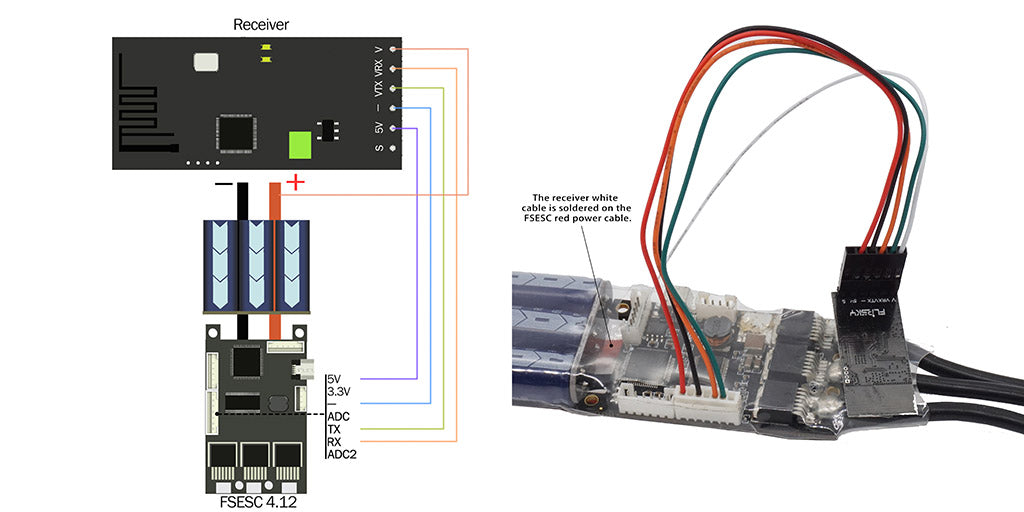
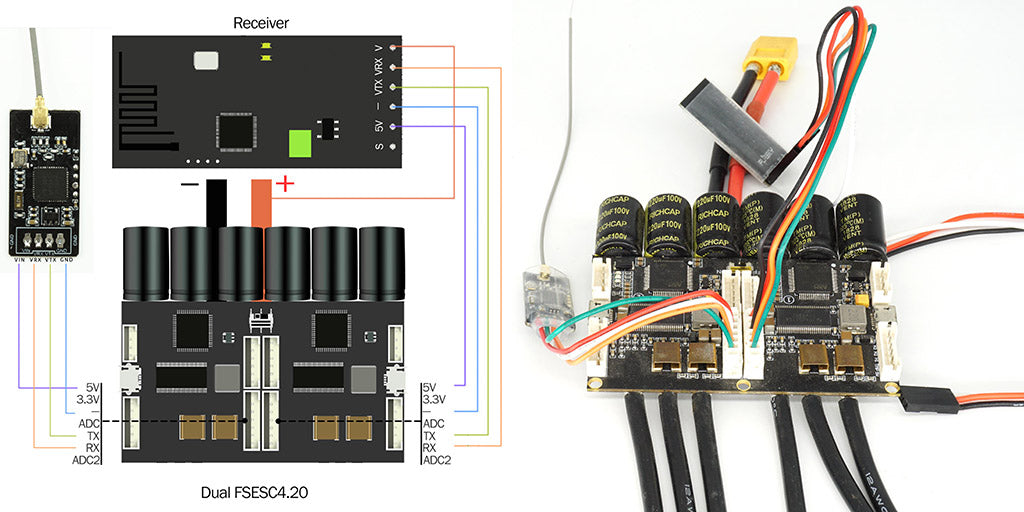
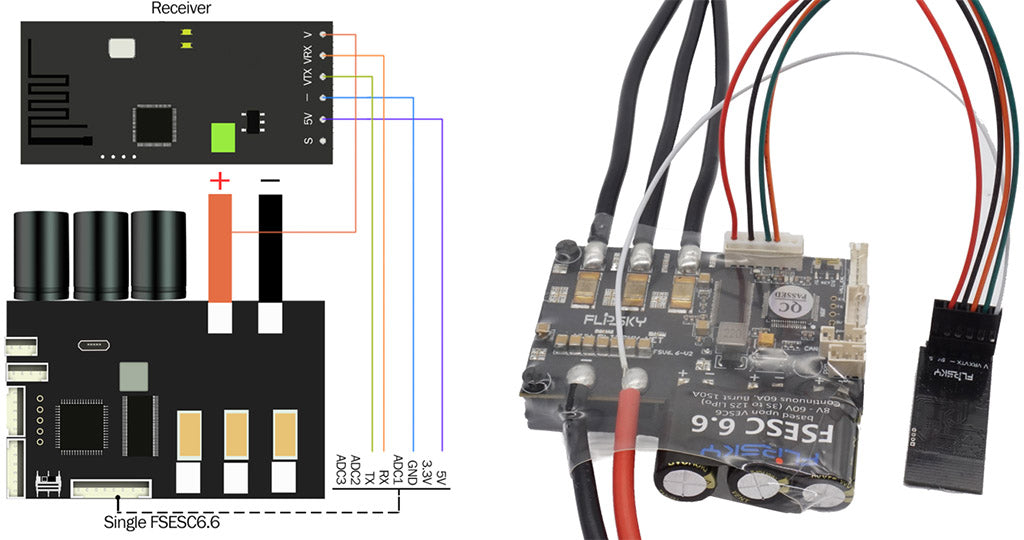
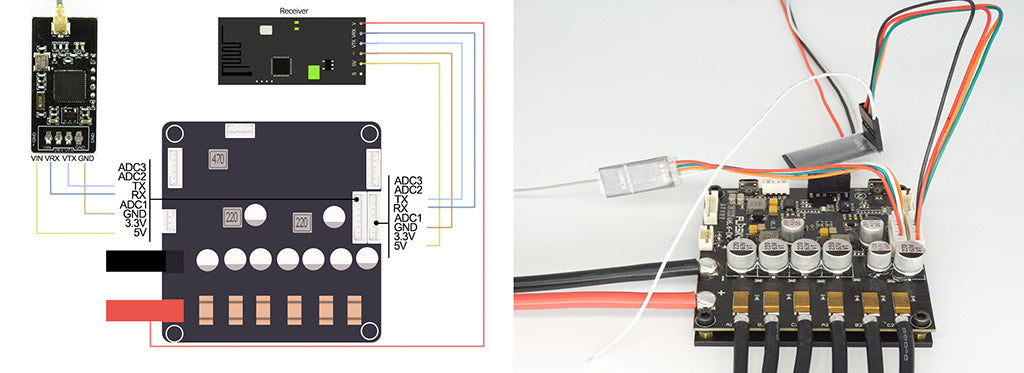
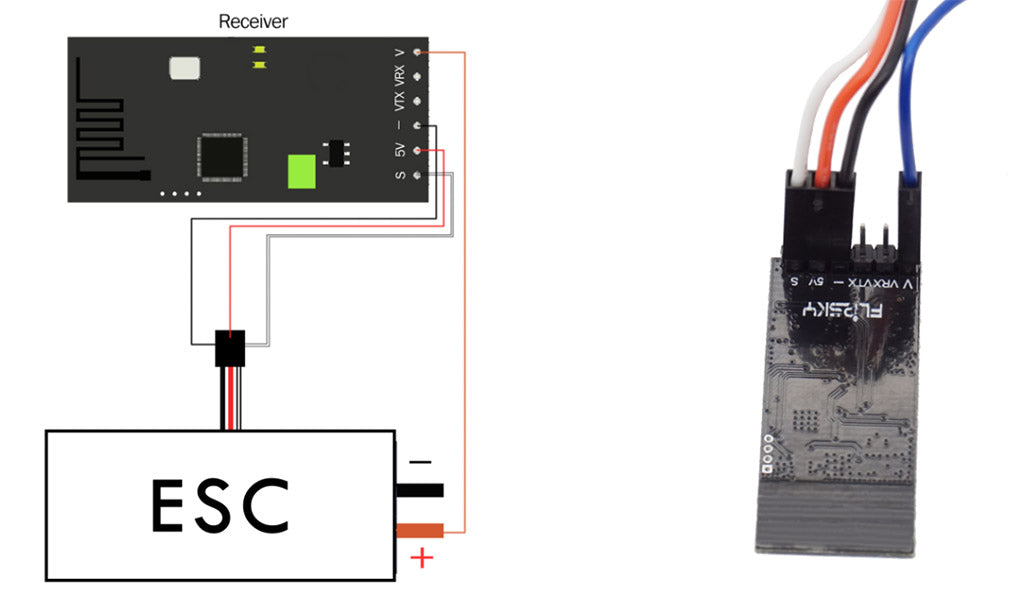
1.Please carefully check following receiver connection diagram corresponding with different FSESC, wrong cable collection in reciver side will cause the receiver burned.
2. The variants (for VESC4/ for VESC6 / For Non VESC) only differenciate on reciver cables , the remote is the same one.
What are the differences between VX1 and VX1 pro?
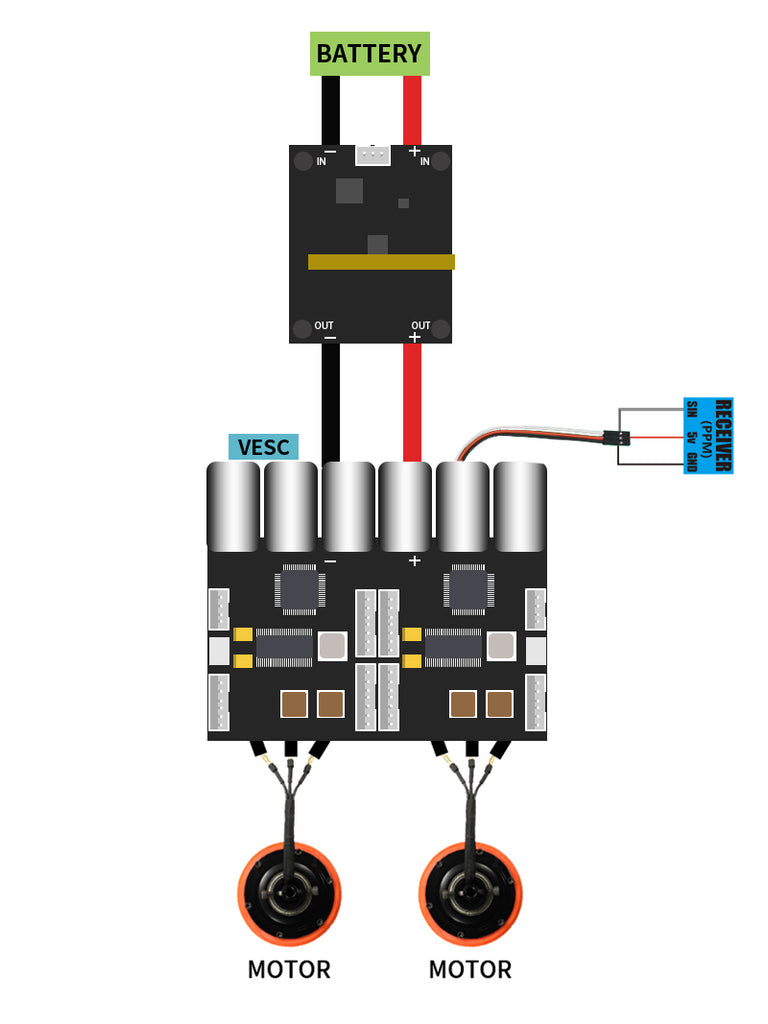
For PPM mode(or Non VESC )

For Dual FSESC4.20 Plus:

For Dual FSESC6.6:

1.Preventing a small spark may cause explosions in some spark-sensitive areas.
2. Add copper bars for better heat dissipation and over-current flow.
3.Anodized aluminum Heatsink with lots of notches for better heat dissipation.
4.Add silicon glue to fix the LED button cable with the heat shrink.
Warnings:
Package included:
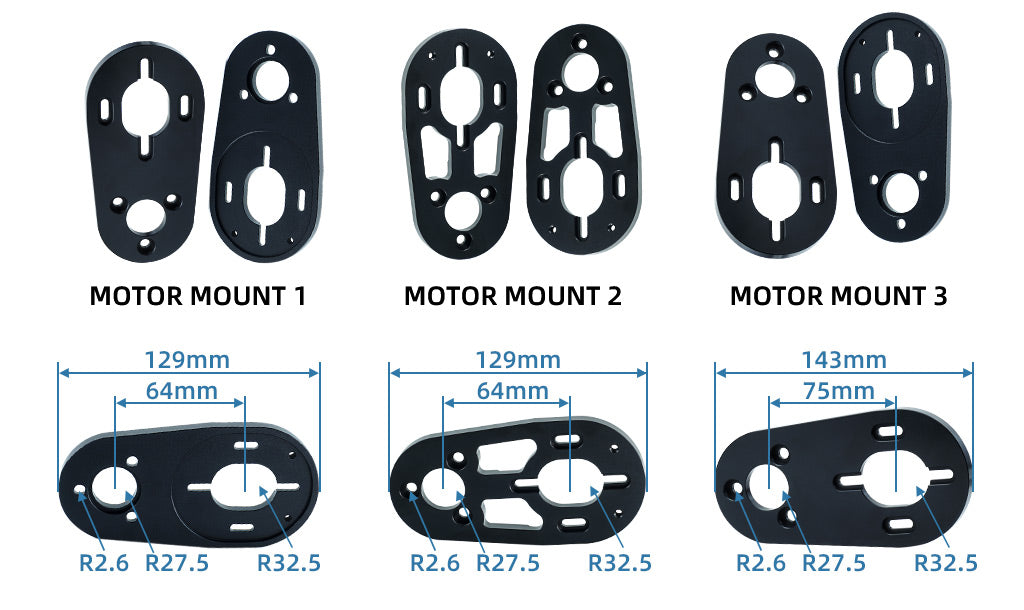
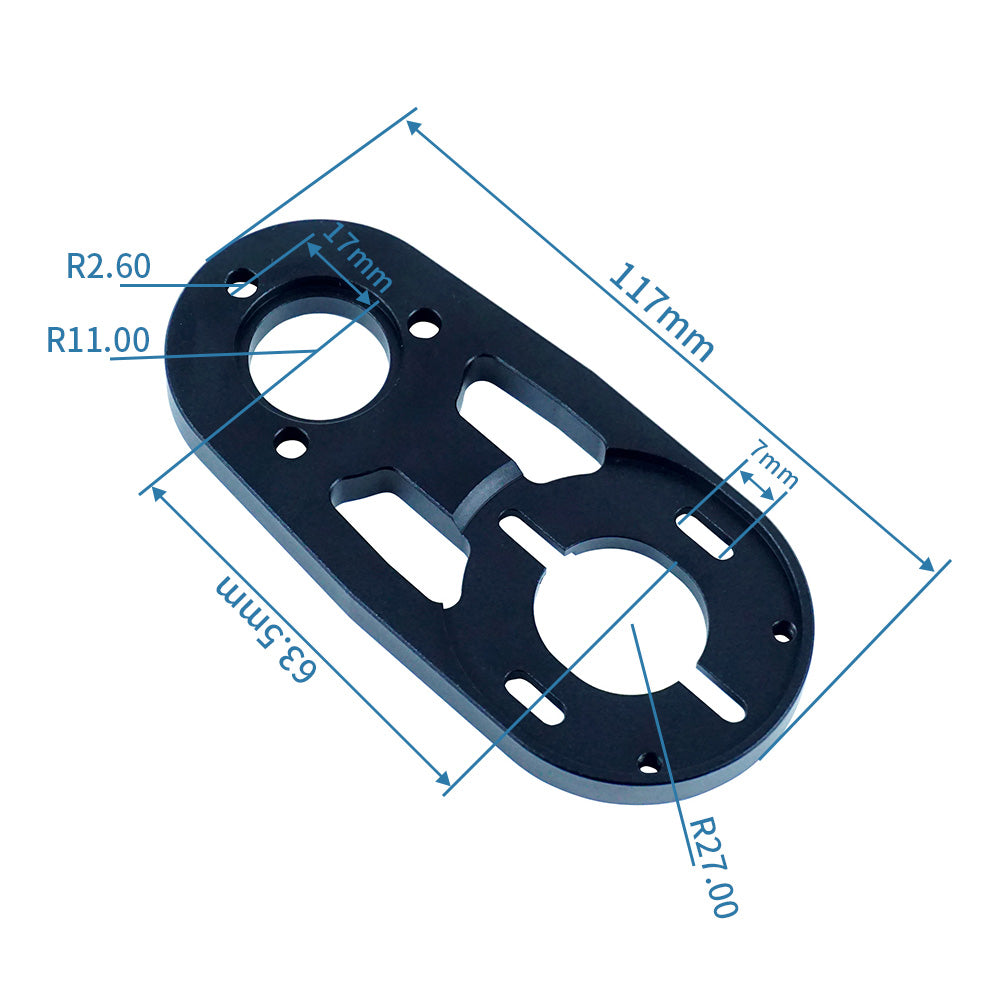
2pcs motor mount
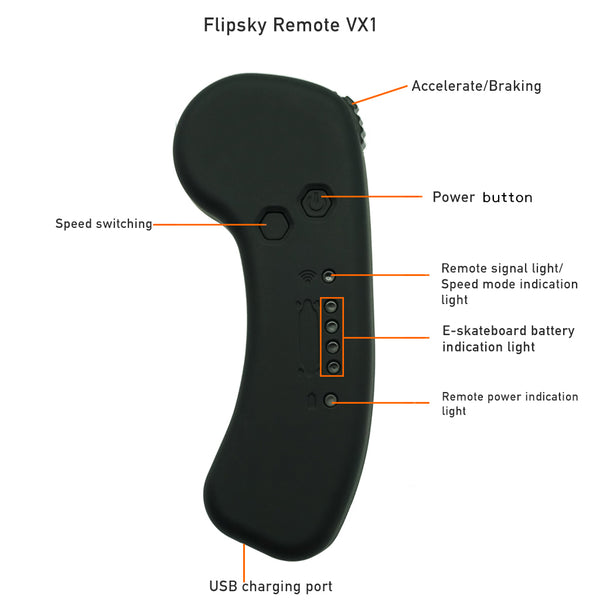
Please use 5V/2A charger for VX1 (Max. Input voltage of 6.5VDC for VX1). Do NOT use a charger with an output voltage more than 6.5V, otherwise the VX1 remote controller may be damaged.
Features
1.Please carefully check following receiver connection diagram corresponding with different FSESC, wrong cable collection in reciver side will cause the receiver burned.
2. The variants (for VESC4/ for VESC6 / For Non VESC) only differenciate on reciver cables , the remote is the same one.
3. When you choose UART mode connection for VX1 remote receiver, pls do connection after your programming in VESC tool. Or else , it will influence programming. And In UART mode, there is no need to do adjust for remote.
For Single V4
For Dual FSESC4.20: Both hook up with bluetooth and remote receiver
For Single V6
For Dual FSESC6.6 Plus : both hook up with bluetooth and remote receiver
For PPM mode(or Non VESC )
Make DIY Hobby More Interesting Together!























