Flash Deals Flipsky 75200 84V High Current With Aluminum PCB Based on VESC For Fighting Robot Surfboard AGV Robot
Warm tips:
It is recommended to keep firmware 5.2 from factory ship, the new firmware upgrade may damage the ESC.
Specs:
- Firmware: 5.2, supports firmware upgrade
- Voltage: 14-84V (safe for 4-20S)
- Continuous current: 50V/200A; 75V/150A (Values depend on the mounting, ambient temperature and air/water circulation around the device!); Burst: 300A
- BEC: 5V@1A
- Support Modes: DC, BLDC, FOC (sinusoidal)
- ERPM: 150000
- Communication Ports: USB, CAN, UART, SPI, IIC
- Supported Sensors: ABI, HALL, AS5047, AS5048A
- Input Source Support: PPM, ADC, NRF, UART
- Supported Sensorless: Yes
- Regenerative capacity: Yes
- Programmable via VESC_TOOL: Yes
- 75200 Size:130x67.7x40.1mm(Including alu. case)
- Motor/power wire size: 8 AWG
Features:
1.Adjustable protection against: low voltage protection, high voltage protection, over current protection, temperature abnormal protection, mosfets / motor over temperature protection.
2.Support various control modes: Current / Duty cycle / Speed / PID control modes.
3.Support the function of balancing car by connecting the IMU module through the IIC interface; support inertial measurement unit modules such as MPU9250, MPU9150, MPU6050, LSM6DS3, BMI160.
4.CPU:32F405 with frequency 168MHz
5.Aluminum PCB with good heat dissipation to expand life span.
6.Two COMM ports: UART bluetooth module, screen display or remote controller supportable.
Warm tips:
Phase filering is not available for Flipsky ESC75100 and 75200!
Please turn off the phase filter function and choose "false" in vesc_tool when use firmware version on or above 5.3 (VESC_TOOL 3.01). Without turning off the phase filter will result in esc damage. Please do not restore the default parameters when using the wizard interface.
Here below video and blog links FYI.
YouTube:Click here
Blog:Click here
Please turn off the phase filter function and choose "false" in vesc_tool when use firmware version on or above 5.3 (VESC_TOOL 3.01). Without turning off the phase filter will result in esc damage. Please do not restore the default parameters when using the wizard interface.
Here below video and blog links FYI.
YouTube:Click here
Blog:Click here
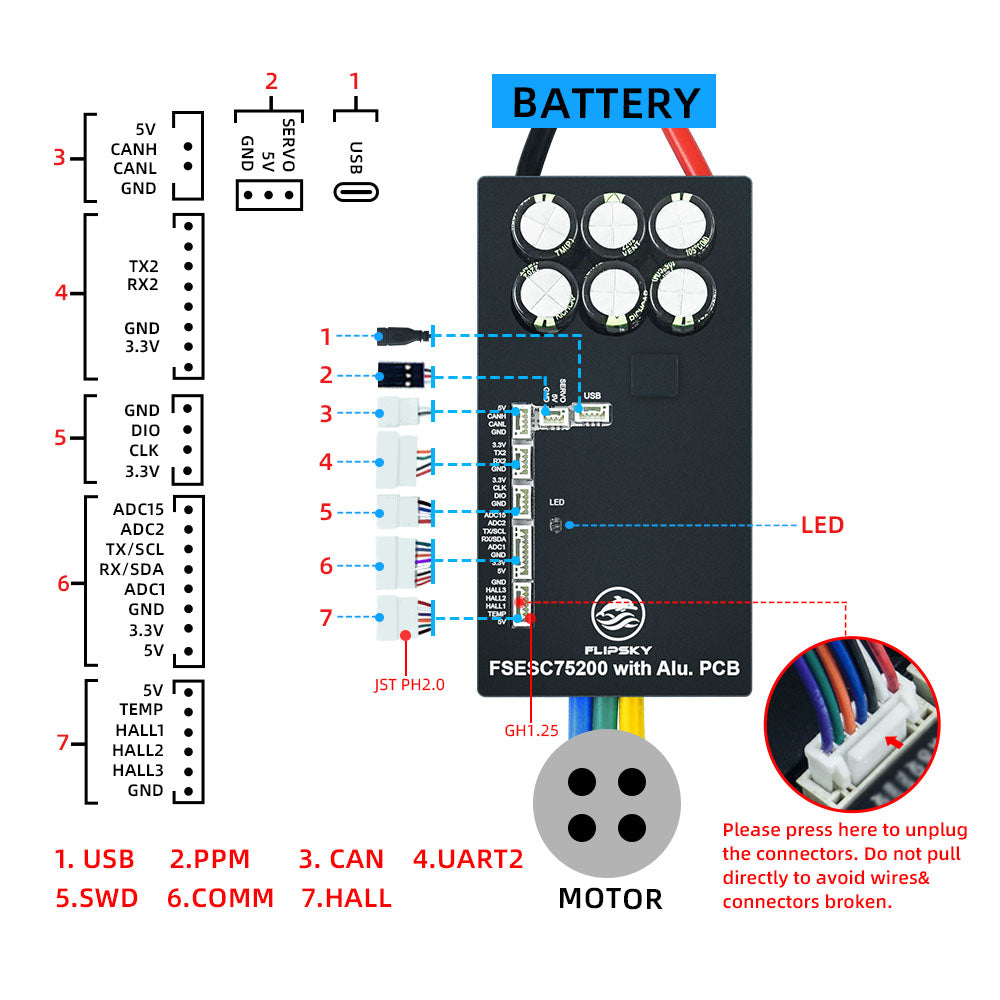
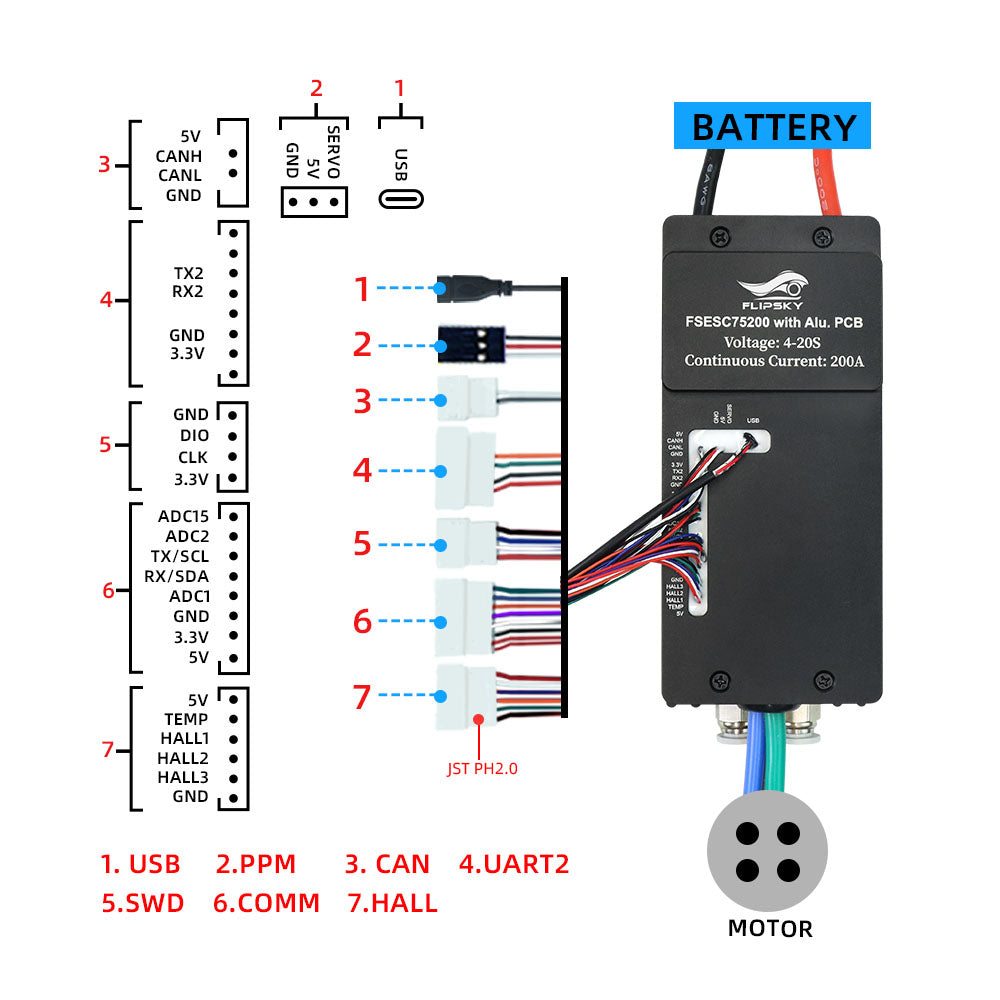
Wiring diagram: