Spec:
- Hardware Version:ODESC4.0/4.1 Single Drive
- PCB layer Number:ODESC4.0/4.1 4 layer*2
- Applicable Voltage: ODESC4.0 8-24V;V4.1 8-56V
- Current Parameter:50A continuous/120A peak
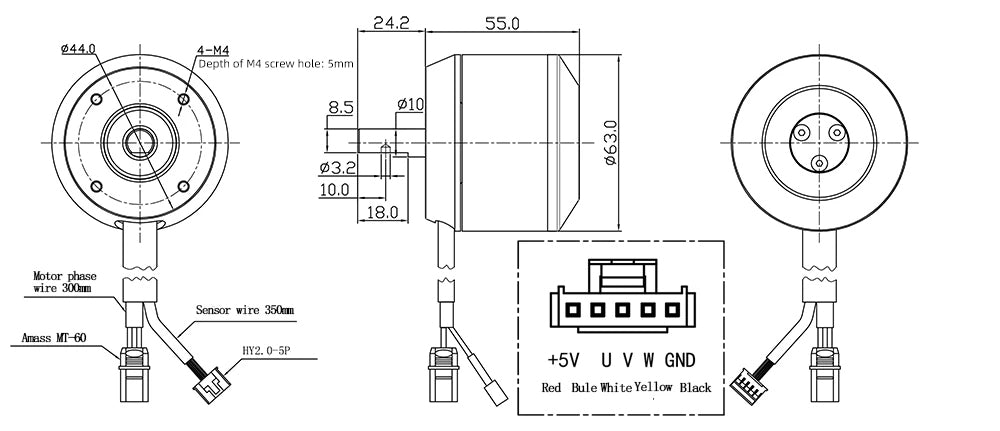
- Support Encoder:Incremental Encoder, Absolute Encoder, Houle Sensor, AMT102, AMT103, TLB5012, AS5047
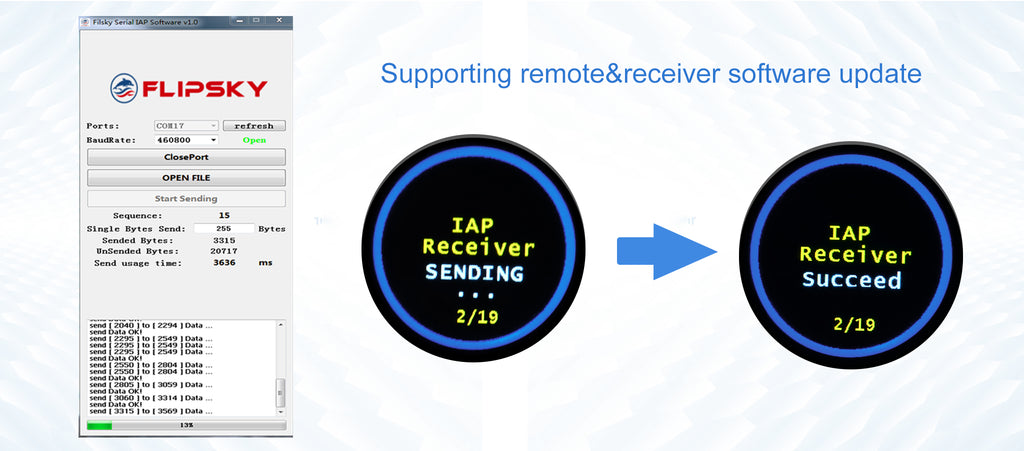
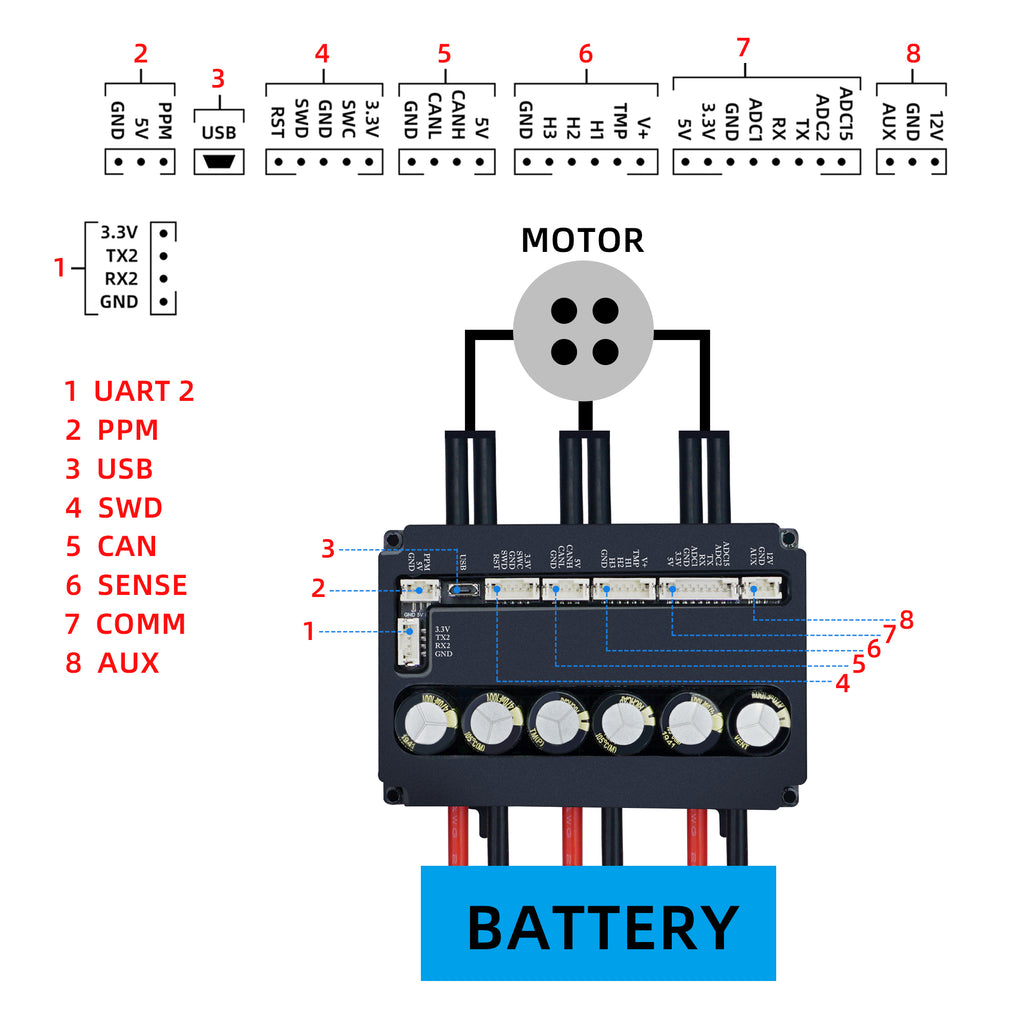
- Communication Interface:USB-Protocol Open Source (PC, Raspberry Pie, Ros) , UART (Embedded Devices) , PWM (RC Remote) ,STEP/DIRECTION(PLC)、GPIO、CAN、ANALOG INPUT
- Voltage Protection:Programmable Voltage Protection to Prevent Excessive Battery Discharge
- Movement Pattern:Speed Mode, Torque Mode, Current Mode, Position Mode, Trajectory Mode, etc.
Feature:
The ODESC high performance brushless driver is based on the open source project ODrive hardware optimization enhancement, stable performance, and match the original Odriver firmware. The USB connected PC terminal can realize motor debugging and complicated multi-axis control, and can realize FOC control for most brushless motors. With the use of encoder, it can also realize any torque, speed loop, position loop, current loop, and position control based on trajectory planning, can be widely used in flexible robot joints, robotic arms, 3D printing, camera universal joints, pan rail, CNC milling machines, ship models, car models and other DIY, industrial and automation fields.
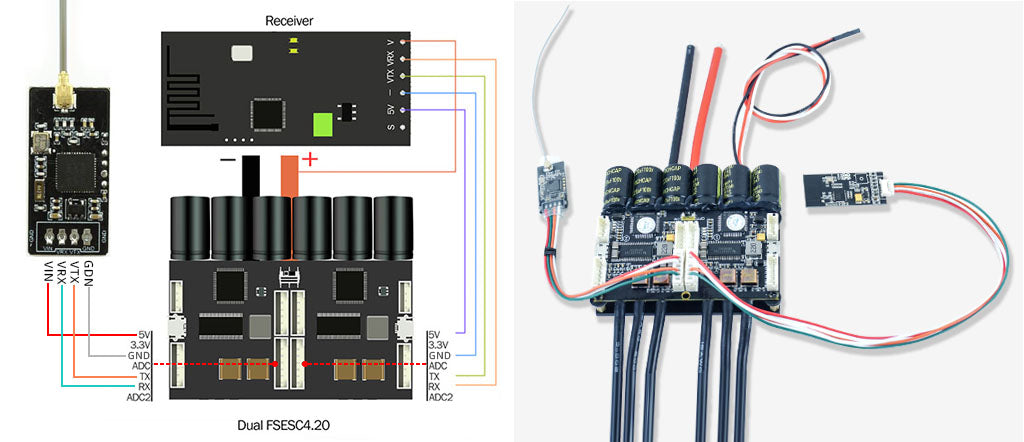
Wiring Diagram:
ODESC4.0/4.1